Mobil Self-Driving Masih Memiliki Masalah Persepsi Yang Besar
Mobil Self-Driving Masih Memiliki Masalah Persepsi Yang Besar – Yulong Cao adalah seorang mahasiswa PhD dalam ilmu komputer dan teknik di University of Michigan. Z. Morley Mao adalah profesor teknik elektro dan ilmu komputer di University of Michigan. Kisah ini pertama kali ditampilkan di The Conversation. Tidak ada yang lebih penting bagi kendaraan otonom selain merasakan apa yang terjadi di sekitarnya. Seperti pengemudi manusia, kendaraan otonom membutuhkan kemampuan untuk membuat keputusan seketika.
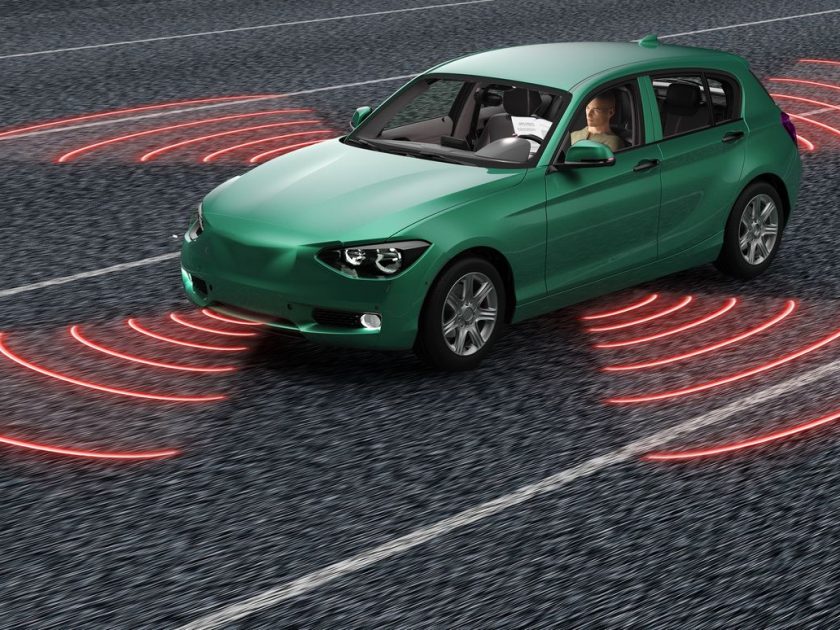
Saat ini, sebagian besar kendaraan otonom mengandalkan banyak sensor untuk memahami dunia. Sebagian besar sistem menggunakan kombinasi kamera, sensor radar, dan sensor LiDAR (deteksi cahaya dan jarak). Di atas pesawat, komputer menggabungkan data ini untuk membuat pandangan menyeluruh tentang apa yang terjadi di sekitar mobil. Tanpa data ini, kendaraan otonom tidak akan memiliki harapan untuk menjelajahi dunia dengan aman. Mobil yang menggunakan beberapa sistem sensor bekerja lebih baik dan lebih aman setiap sistem dapat berfungsi sebagai pengawas pada yang lain tetapi tidak ada sistem yang kebal dari serangan. slot gacor
Sayangnya, sistem ini tidak selalu aman. Sistem persepsi berbasis kamera dapat diakali hanya dengan menempelkan stiker pada rambu lalu lintas untuk sepenuhnya mengubah maknanya. Pekerjaan kami, dari Grup Riset RobustNet di Universitas Michigan, telah menunjukkan bahwa sistem persepsi berbasis LiDAR juga dapat terdiri dari. Dengan memalsukan sinyal sensor LiDAR secara strategis, serangan tersebut mampu mengelabui sistem persepsi berbasis LiDAR kendaraan untuk “melihat” rintangan yang tidak ada. Jika ini terjadi, kendaraan dapat menyebabkan kecelakaan dengan memblokir lalu lintas atau mengerem secara tiba-tiba.
Spoofing Sinyal LiDAR
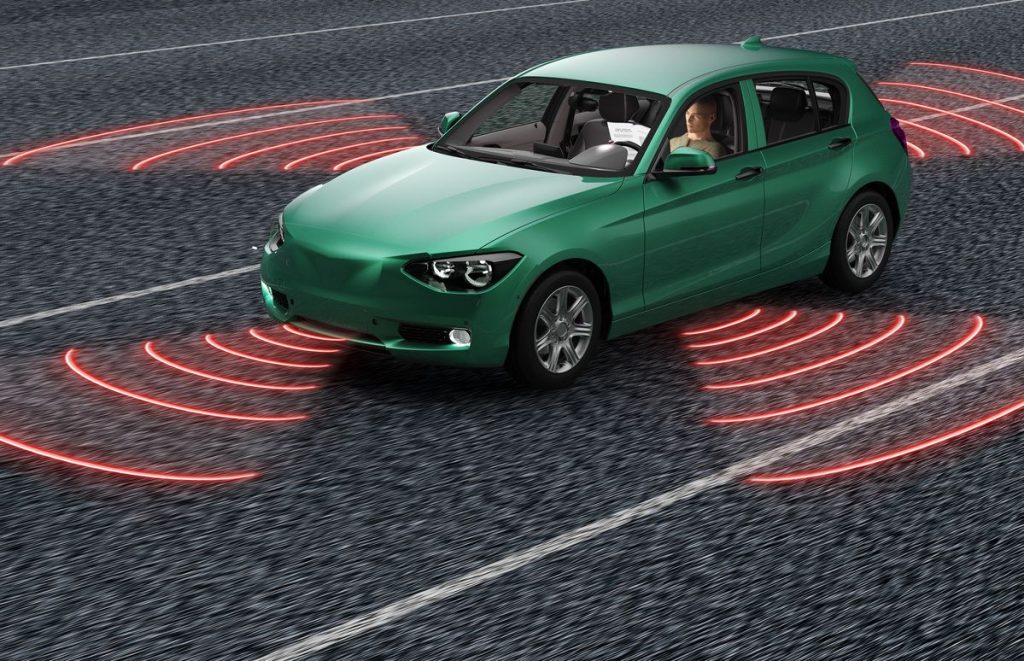
Sistem persepsi berbasis LiDAR memiliki dua komponen: sensor dan model pembelajaran mesin yang memproses data sensor. Sensor LiDAR menghitung jarak antara dirinya dan sekitarnya dengan memancarkan sinyal cahaya dan mengukur berapa lama sinyal tersebut memantul dari objek dan kembali ke sensor. Durasi bolak-balik ini juga dikenal sebagai “waktu penerbangan”.
Unit LiDAR mengirimkan puluhan ribu sinyal cahaya per detik. Kemudian model pembelajaran mesinnya menggunakan pulsa yang dikembalikan untuk melukiskan gambaran dunia di sekitar kendaraan. Ini mirip dengan bagaimana kelelawar menggunakan ekolokasi untuk mengetahui di mana rintangan berada di malam hari.
Masalahnya adalah pulsa ini bisa dipalsukan. Untuk mengelabui sensor, penyerang dapat menyorotkan sinyal cahayanya sendiri ke sensor. Hanya itu yang Anda butuhkan untuk membuat sensor tercampur.
Namun, lebih sulit untuk memalsukan sensor LiDAR untuk “melihat” “kendaraan” yang tidak ada. Untuk berhasil, penyerang perlu tepat waktu sinyal menembak korban LiDAR. Ini harus terjadi pada tingkat nanodetik, karena sinyal bergerak dengan kecepatan cahaya. Perbedaan kecil akan terlihat saat LiDAR menghitung jarak menggunakan waktu terbang yang diukur.
Jika penyerang berhasil menipu sensor LiDAR, ia juga harus mengelabui model pembelajaran mesin. Pekerjaan yang dilakukan di lab penelitian OpenAI menunjukkan bahwa model pembelajaran mesin rentan terhadap sinyal atau input yang dibuat secara khusus yang dikenal sebagai contoh permusuhan. Misalnya, stiker yang dibuat secara khusus pada rambu lalu lintas dapat menipu persepsi berbasis kamera.
Kami menemukan bahwa penyerang dapat menggunakan teknik serupa untuk membuat gangguan yang bekerja melawan LiDAR. Mereka tidak akan menjadi stiker yang terlihat, tetapi sinyal palsu yang dibuat khusus untuk mengelabui model pembelajaran mesin agar berpikir bahwa ada kendala yang muncul padahal sebenarnya tidak ada. Sensor LiDAR akan memberi sinyal palsu peretas ke model pembelajaran mesin, yang akan mengenalinya sebagai penghalang.
Contoh permusuhan objek palsu dapat dibuat untuk memenuhi ekspektasi model pembelajaran mesin. Misalnya, penyerang mungkin membuat sinyal truk yang tidak bergerak. Kemudian, untuk melakukan penyerangan, mereka dapat mendirikannya di sebuah perempatan atau meletakkannya di atas kendaraan yang dikendarai di depan kendaraan otonom.
Dua Kemungkinan Serangan
Untuk mendemonstrasikan serangan yang dirancang, kami memilih sistem penggerak otonom yang digunakan oleh banyak pembuat mobil: Baidu Apollo. Produk ini memiliki lebih dari 100 mitra dan telah mencapai kesepakatan produksi massal dengan beberapa produsen termasuk Volvo dan Ford.
Dengan menggunakan data sensor dunia nyata yang dikumpulkan oleh tim Baidu Apollo, kami mendemonstrasikan dua serangan berbeda . Yang pertama, “serangan rem darurat”, kami menunjukkan bagaimana penyerang dapat tiba-tiba menghentikan kendaraan yang sedang bergerak dengan mengelabui agar mengira ada penghalang di jalurnya. Yang kedua, “Serangan pembekuan AV,” kami menggunakan penghalang palsu untuk mengelabui kendaraan yang telah dihentikan di lampu merah agar tetap berhenti setelah lampu menyala hijau.
Dengan memanfaatkan kerentanan sistem persepsi mengemudi otonom, kami berharap dapat memicu alarm untuk tim yang membangun teknologi otonom. Penelitian tentang jenis baru masalah keamanan dalam sistem mengemudi otonom baru saja dimulai, dan kami berharap dapat mengungkap lebih banyak kemungkinan masalah sebelum dapat dieksploitasi di jalan oleh pelaku kejahatan.